文章
Omega 如何用 NVIDIA Isaac Sim / Isaac Lab 推進無人化
Powered by NVIDIA — 用 Omniverse 生態系把「模擬、資料、學習」串成可落地的工程流程
一句話總結
Omega 把無人化拆成可驗證的步驟:在數位孿生裡把風險跑出來、把效率量出來、把回退演練到可靠, 然後才逐步導入真實場域,讓部署更快、更安全、更可控。
為什麼先模擬?
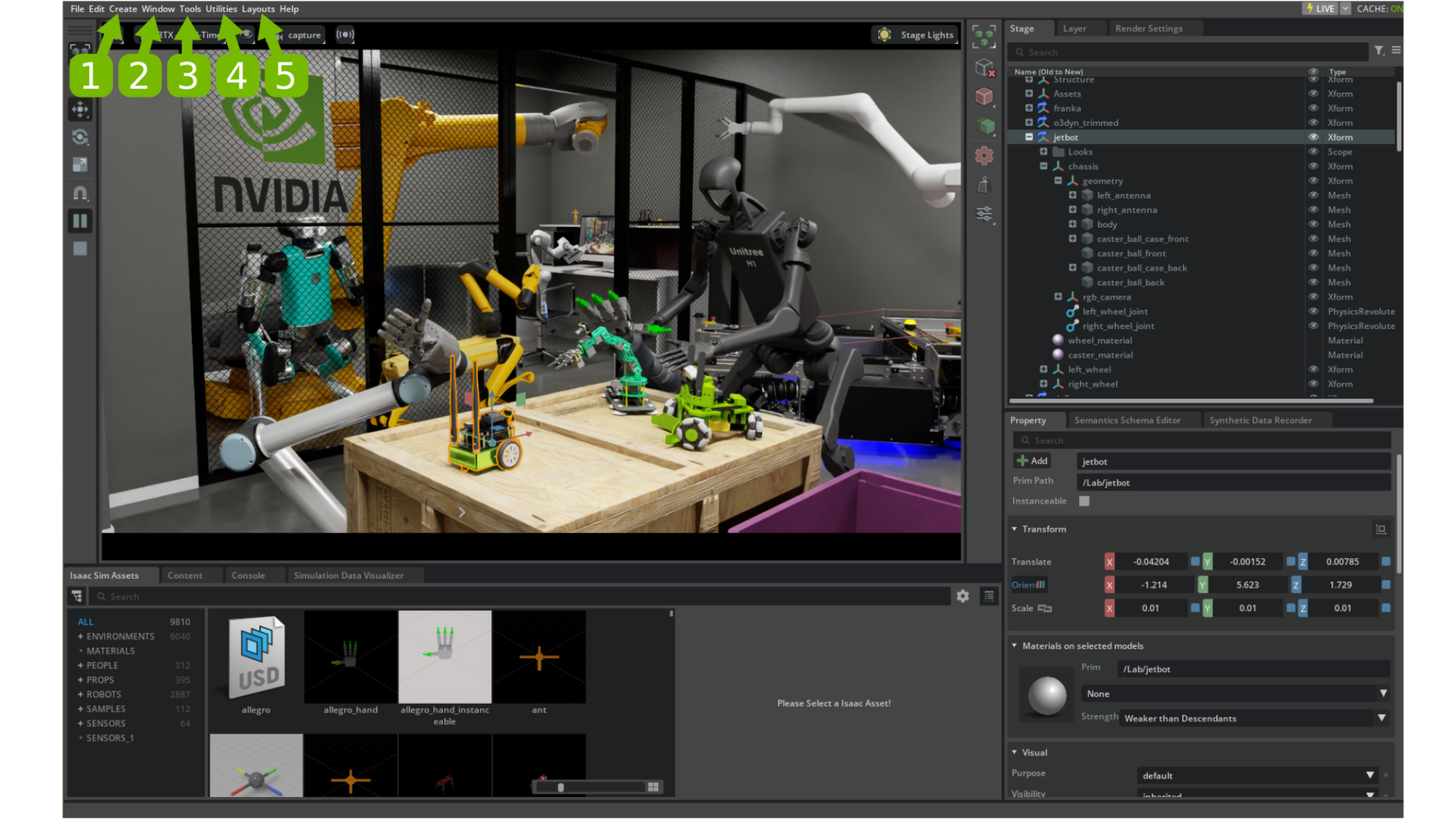
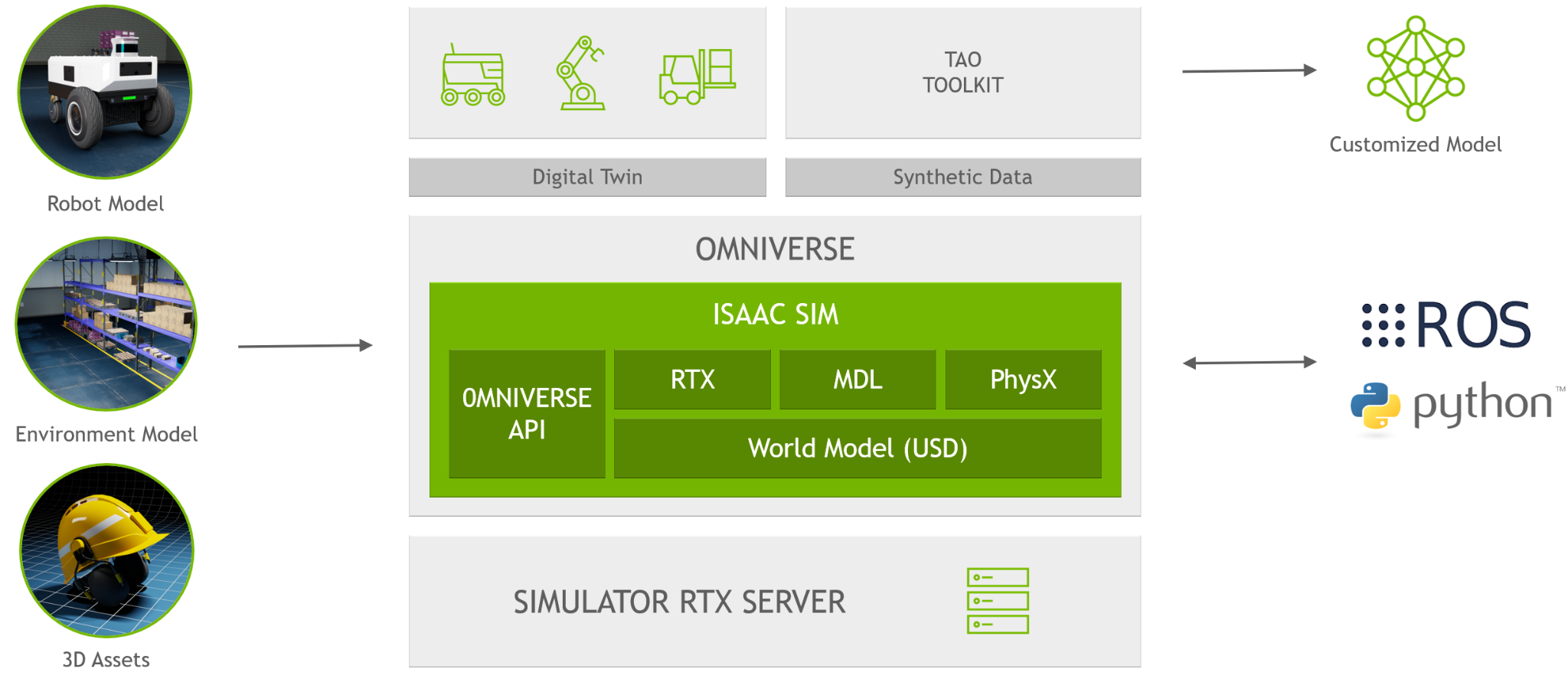
真機試錯往往很貴(停線、場地、人力)、很慢(排程、調參、迭代)、很危險(碰撞、夾傷、失控), 也很難完整回放與稽核。透過 NVIDIA Isaac Sim(建於 Omniverse / PhysX / RTX 等技術), 我們可以把機器人、環境與物理特性放進同一個可重現的世界模型,先把不確定性消化掉。
第一法則(Safety)
把人類安全變成「可測試」的約束:禁入區、速度限制、E-Stop、碰撞風險、失效保護。
第二法則(Human-in-the-loop)
把「人類覆寫」做成機制:授權、指令確認、接管通道、回放與責任追溯。
第三法則(Resilience)
把「保護自己」做成策略:故障隔離、降級模式、回退路徑、健康監控與自我保護。
三大用途(Omega 主要拿來做三件事)
我們把 Isaac Sim / Isaac Lab 主要用在三類工作,並把它們接到同一套交付流程。
模擬與驗證(Simulation & Validation)
- 物理真實:碰撞、關節、摩擦、致動、接觸動力學等。
- SIL/HIL:軟體迴路(SIL)與硬體迴路(HIL)測試。
- 行為驗證:成功率、碰撞率、越界率、回退成功率。
合成資料(Synthetic Data)
- 標註資料:RGB、BBox、語意/實例分割、深度等。
- 域隨機化:光照、材質、位置、背景… 提升泛化。
- 低成本擴充:把「拍不到/太危險」的場景搬進模擬生成。
機器人學習(Robot Learning)
- Isaac Lab:在模擬中做強化學習/策略訓練。
- 加速試錯:把昂貴、很慢、很危險的迭代搬到模擬。
- 再轉真機:上線前先用回放與驗收規格控風險。
Omega × Isaac Lab:文章式交付流程(PoC → Pilot → Scale)
下面是 Omega 用 Isaac Lab 做「可交付」的落地流程(以無人搬運/巡檢/操作為例):
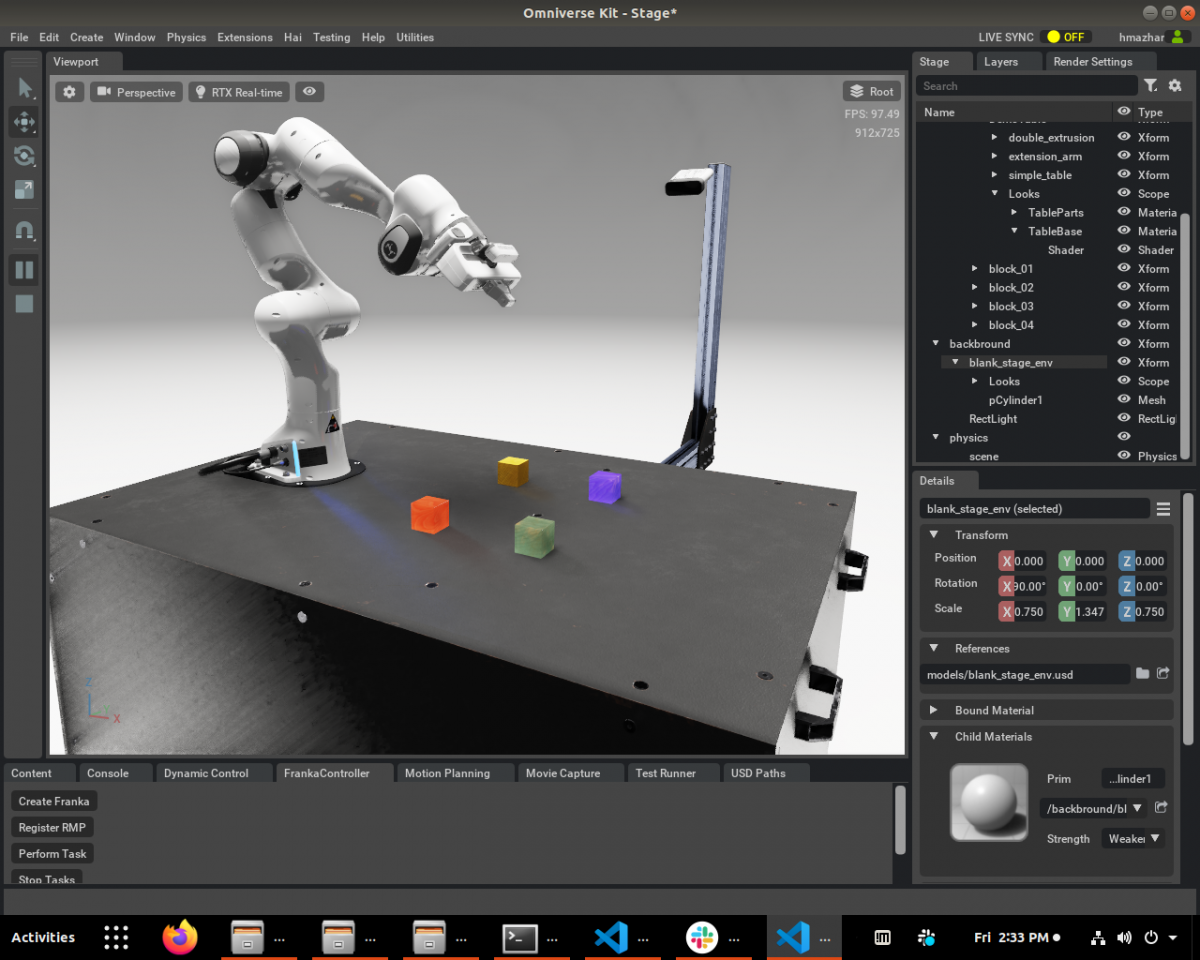
- Step 1|建立數位孿生:把場域與機器人放進 Isaac Sim,校準尺寸、摩擦、關節與致動參數。
- Step 2|定義安全邊界:禁入區、速度上限、接近人員策略;加入 E-Stop 與 Fail-safe。
- Step 3|SIL/HIL 驗證:先 SIL,再接 HIL,把真機問題提前暴露。
- Step 4|合成資料訓練感知:用 SDG/Replicator 生成標註資料,做 domain randomization 訓練感知。
- Step 5|策略訓練:用 Isaac Lab 跑 RL/策略,碰撞/越界/危險接近給高懲罰,確保符合三原則。
- Step 6|驗收與回放:建立基準測試(成功率/碰撞率/回退率/停機反應時間),每版都能回放稽核。
- Step 7|逐步導入真實場域:限制區域/速度/任務,逐步擴大;異常可回退到上一個安全版本。
Omega 的工程承諾
我們不追求「一次到位的全無人化」,而是追求可持續、可審計、可回退的自動化擴張。 每一步都要能量化風險與效益,才能讓無人化真正進入生產環境。
備註:本頁為技術介紹與方法論;實際落地會依場域、設備與安全規範制定具體驗收項目。